Después de 3 o 4 días, Pol ha terminado de montar su primer vehículo en Lego equipado con tracción total, doble diferencial y control de giro en las cuatro ruedas a través de servomotor.
Lo ha hecho con piezas que teníamos por casa y siguiendo, sobre todo al principio, las instrucciones de https://share.hj-aiot.com/-8AnQ2xARrt.
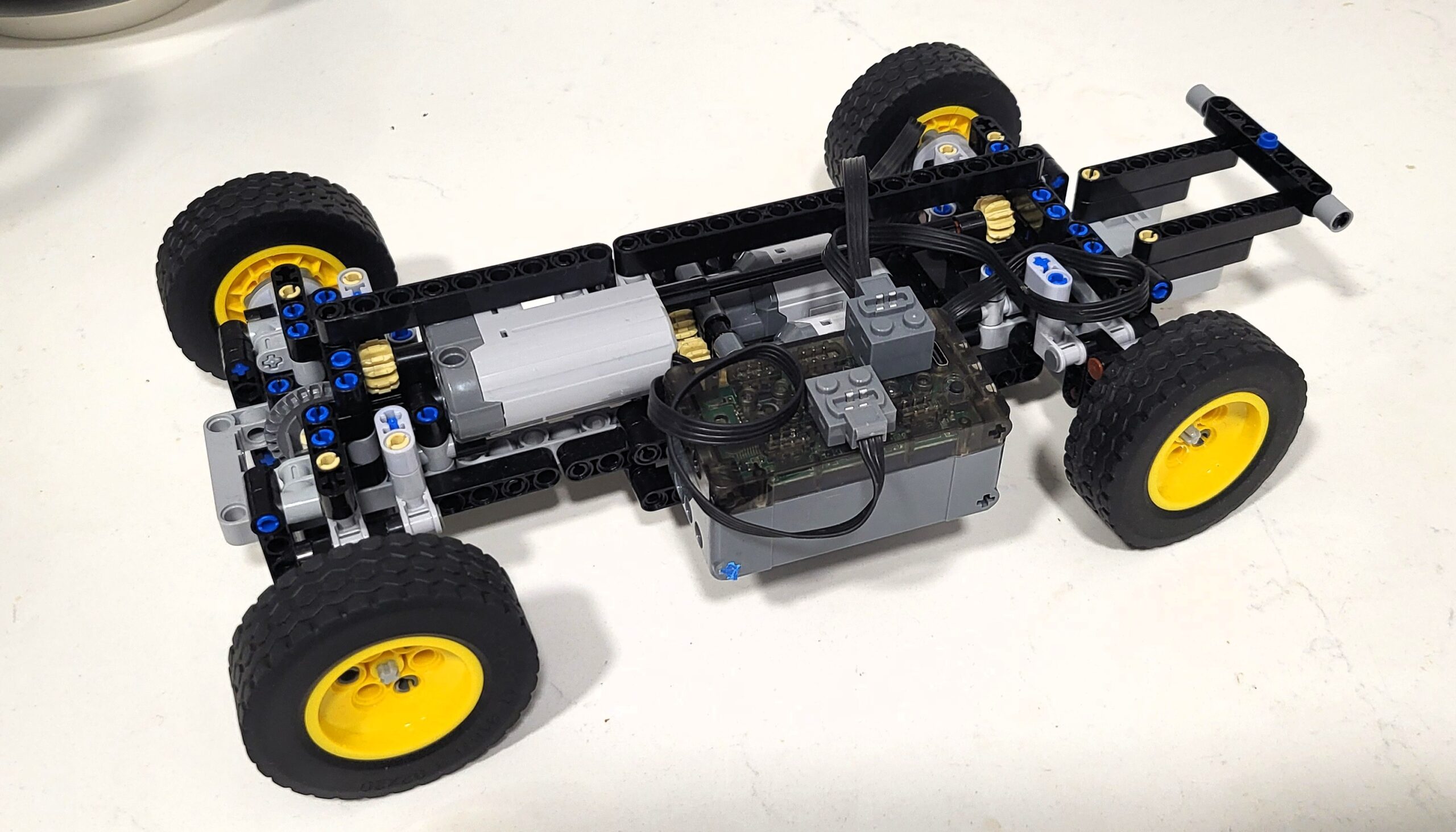
Lo interesante de este diseño es que el sistema de giro a través de servo no solamente es en las ruedas delanteras sino que se transmite también a las traseras, ampliando el ángulo de giro drásticamente.
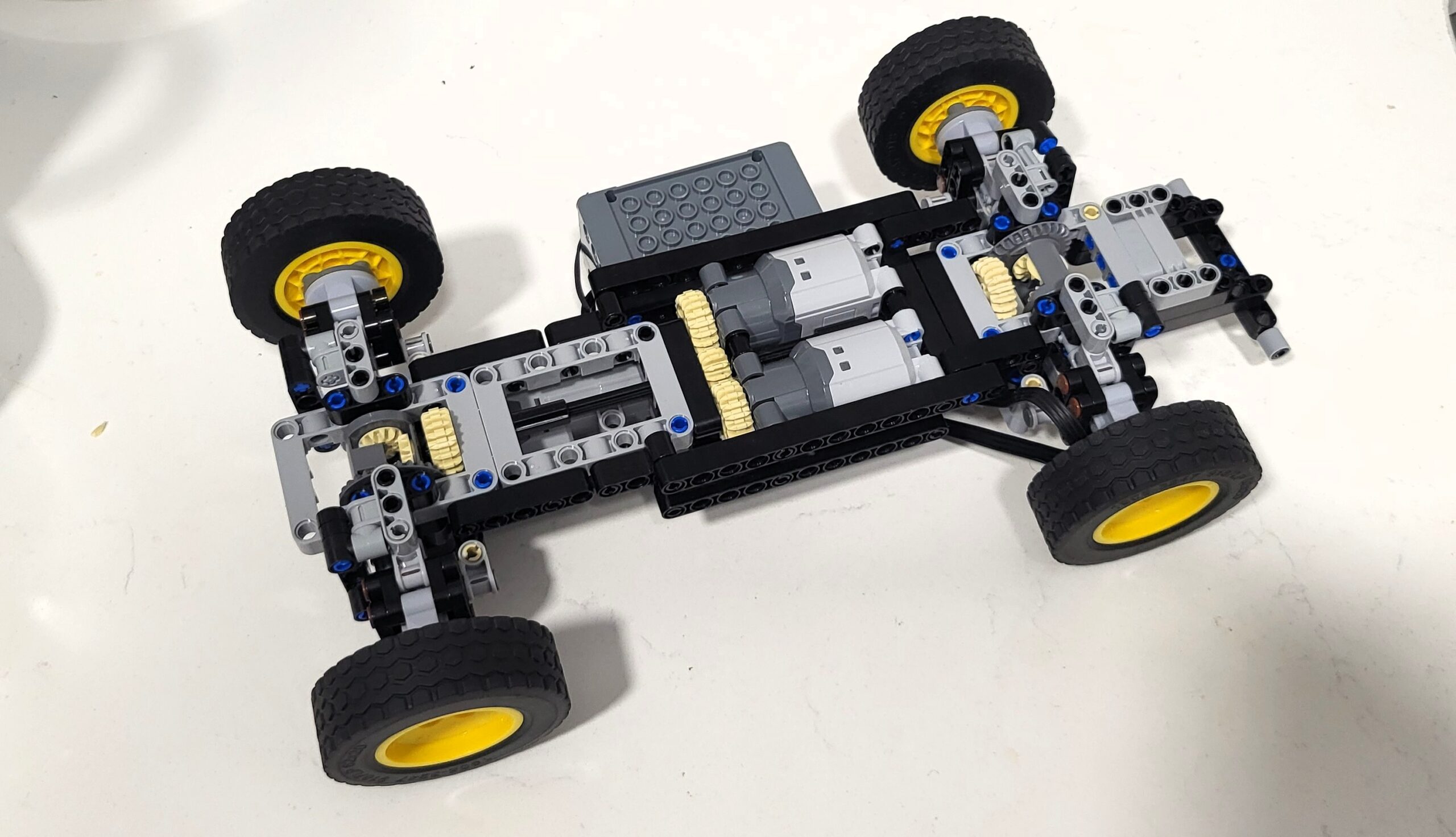
El sistema de propulsión equipa dos motores sincronizados que le aportan mucha velocidad. El vehículo se controla con una mando a distancia teledirigido utilizando el módulo Hotut que le regalamos para su cumpleaños.
Una de las mejoras que nos gustaría introducir es el de poder bloquear los dos diferenciales con el mando a distancia. Esto es importante para superar la prueba del sofá que consiste en atravesar 4 o 5 cojines ubicados de forma irregular. Sin bloqueo de diferenciales, a la que se queda una rueda en el aire pierde tracción porque el diferencial hace que sea esa la única que gire.
Tenemos que ver como lo hacemos mecánicamente porque a nivel electrónico será fácil: en el sistema de mando a distancia aun nos quedan puertos libres para conectar.