Por fin llegó mi EADELTA 11, una delta loop multibanda desde 14 MHz a 54 MHz que había comprado en WiMo hacía un mes, en Alemania, por 225€. Técnicamente es capaz de cubrir 6 bandas, 6/10/12/15/17/20 metros, aunque en la realidad es una multibanda pura con un balun 1:1 en la base y un bucle no resonante en ninguna de esas bandas.
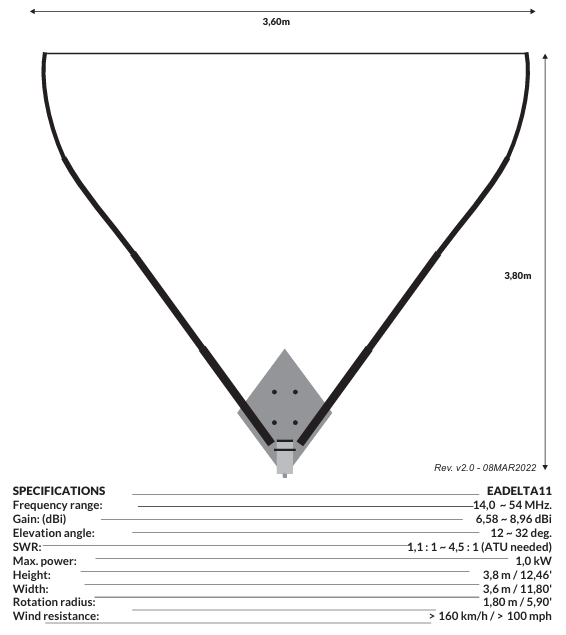
Las medidas de la antena son bastante contenidas: 3,8 metros de altura por 3,6 metros de ancho. Teniendo en cuenta que he colocado unos 4 metros de mastil (2,5 + 1,5) a unos 2 metros del suelo, la altura total del montaje es de unos 10 metros, más o menos, sostenidos por un sistema de tres vientos con buen anclaje.
Una vez instalada el cambio es muy sustancial respecto a mi antigua vertical multibanda o a un simple dipolo en V invertida. Pese a que a nivel de transmisión yo creo que se equipara bastante a la vertical, a nivel de recepción el ruido ha disminuído de 3 a 4 puntos, sobre todo en 20m.
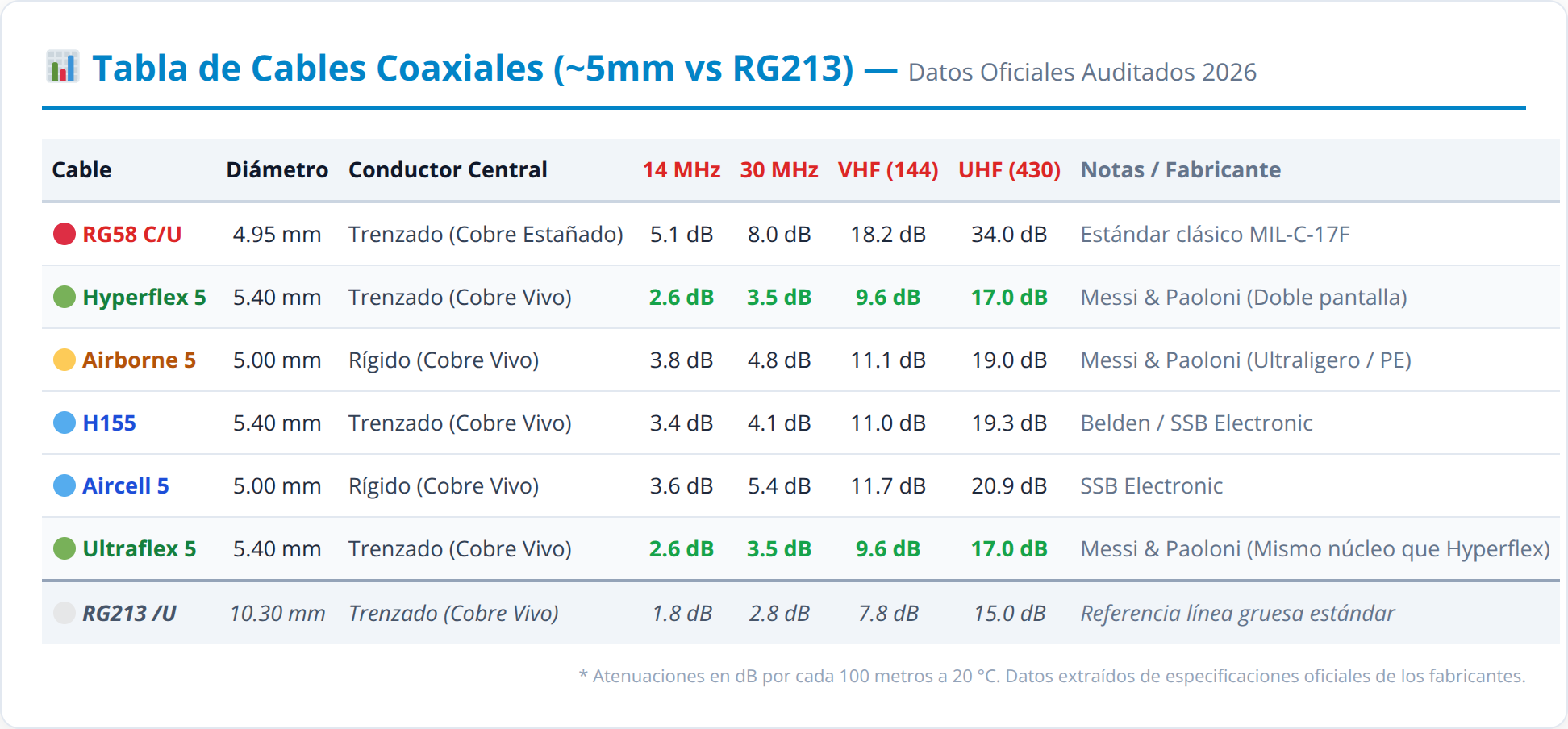
Un aspecto importante a tener en cuenta es que en 10 metros no me hace falta el acoplador pero prácticamente para el resto de bandas, he necesitado un sintonizador de antena externo porque el de la IC7300 no llegaba. En concreto, he utilizado el MAT-Tuner mAT-180H que utilizaba con mi Icom IC7000 y que funciona también perfectamente con la IC7300 utilizando el cable especial para Icom. De hecho, incluso he podido hacer QSOs en 30 y 40 metros con la misma antena.
En resumen, estoy muy satisfecho con mi nueva adquisición porque no se me resiste prácticamente nada y con poca potencia 10-20 W soy capaz de cubrir toda Europa sin problemas.
Por si hay algún interesado aquí dejo el manual de montaje y las especificaciones técnicas de la antena.