Hace unas semanas, para el cumpleaños de Pol, le regalamos un mecanismo de mando a distancia para Power Functions de Lego que incorporaba una unidad central equipada con una batería recargable y capacidad para controlar hasta 6 motores o luces, 4 de ellos con potenciómetros regulables.
La marca del dispositivo era Hotut y nos costó unos 22€. Este es el link por si hay algún interesado.
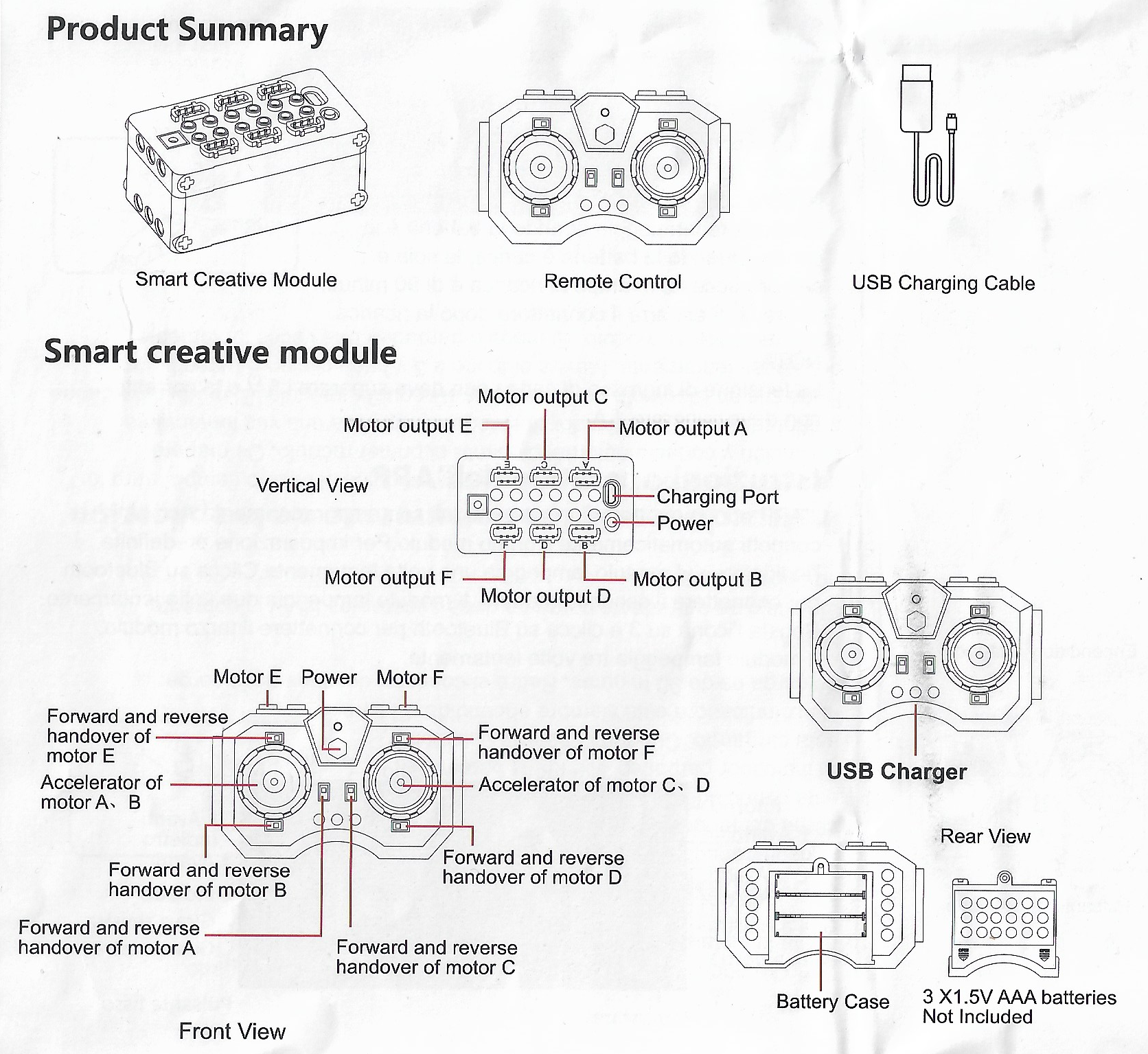
Esquema de conexión de la unidad central del mando a distancia para Lego
El dispositivo ha funcionado a la primera y la batería dura bastante. La verdad es que estamos muy contentos porque nos permitirá construir coches y poder controlar velocidad y dirección conectándolo a un motor convencional y a otro que sea servo.
Otra gran ventaja es que también se pueden controlar los 6 puertos (motores, luces,…) desde el teléfono móvil con una aplicación específica.
Los sábados, Pol, Blanca y yo solemos levantarnos bastante temprano, entre las 7 y las 8 de la mañana, y utilizamos alrededor de las primeras dos horas del día para construir cosas con Lego. Blanca es más de Lego Classic mientras que Pol y yo lo somos de Lego Technic que combinamos con motores y algo de electrónica variada.
Son dos horas de creatividad pura donde inventamos edificios, máquinas, vehículos, gruas y artilugios de todo tipo.
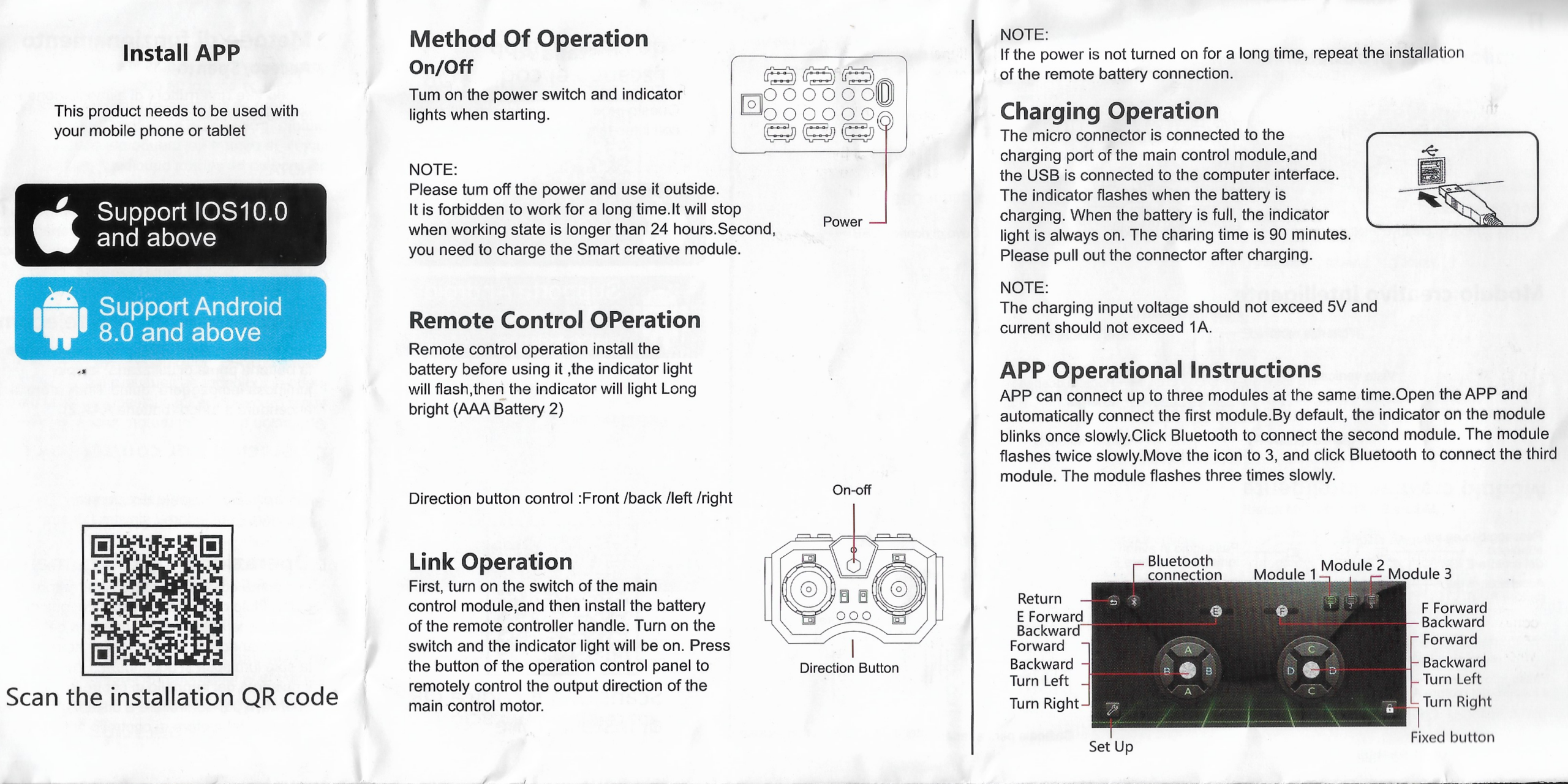
Nuestro último descubrimiento ha sido rebrickable.com, una magnífica web donde puedes encontrar diseños originales de cualquier tipo, muchos con instrucciones (además de fotografías) en PDF y otros con archivos «.io». Estos archivos se abren con el Studio 2.0, que es la aplicación oficial de Lego utilizada para gestionar y generar los manuales de instrucciones y que ha sido desarrollada y es mantenida por Brick Link, una compañía propiedad de Lego.
Studio 2.0 abierto en mi ordenador mostrando un diseño original subido a rebrickable.com
Además, también tienes Part Designer que es la aplicación que puedes utilizar para crear nuevas piezas de Lego, por ejemplo si quieres añadir un texto o una combinación especial de colores a piezas ya existentes.
Mis hijos hace semanas que insistían en que hiciéramos un teleférico con Lego y especialmente Blanca estaba muy interesada en extenderlo para hacer un telesilla que recorriera toda la casa y que utilizásemos harina para simular nieve. Ya le he dicho que lo de la harina no lo veía claro…
Lo que si hemos hecho es el mecanismo de un teleférico que hemos colgado atravesando todo el comedor con una longitud total de unos 7 u 8 metros.
Básicamente hemos utilizado un hilo de nylon de pescar de los que son capaces de soportar hasta 6 kgs y lo hemos atado y tensado de puerta a puerta. La idea era tener el hilo fijo y un mecanismo móvil hecho con Lego Technic que a base de poleas y motores se fuera moviendo por el cable.
Teleférico con Lego Technic
El diseño es bastante sencillo y lo único que hemos tenido que probar varias veces es el sistema de suspensión porque tenía que estar compensado a nivel de pesos para que no se tumbara. Al final lo hemos resuelto ubicando las baterías en la parte más baja y compensando su peso con el del motor en el otro lado y más arriba.
Le hemos añadido también un mecanismo de control remoto para poderlo mover adelante y atrás cómodamente desde el sofá.
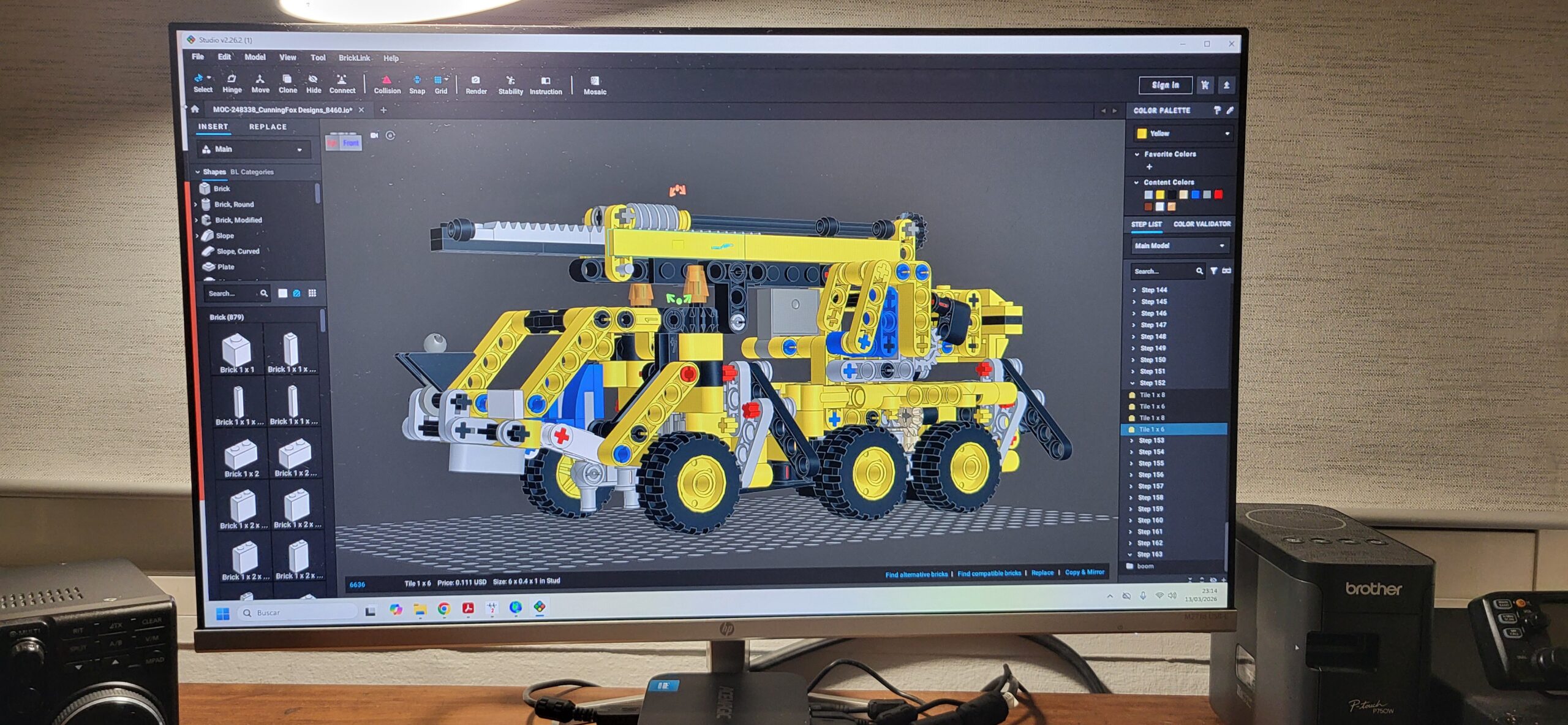
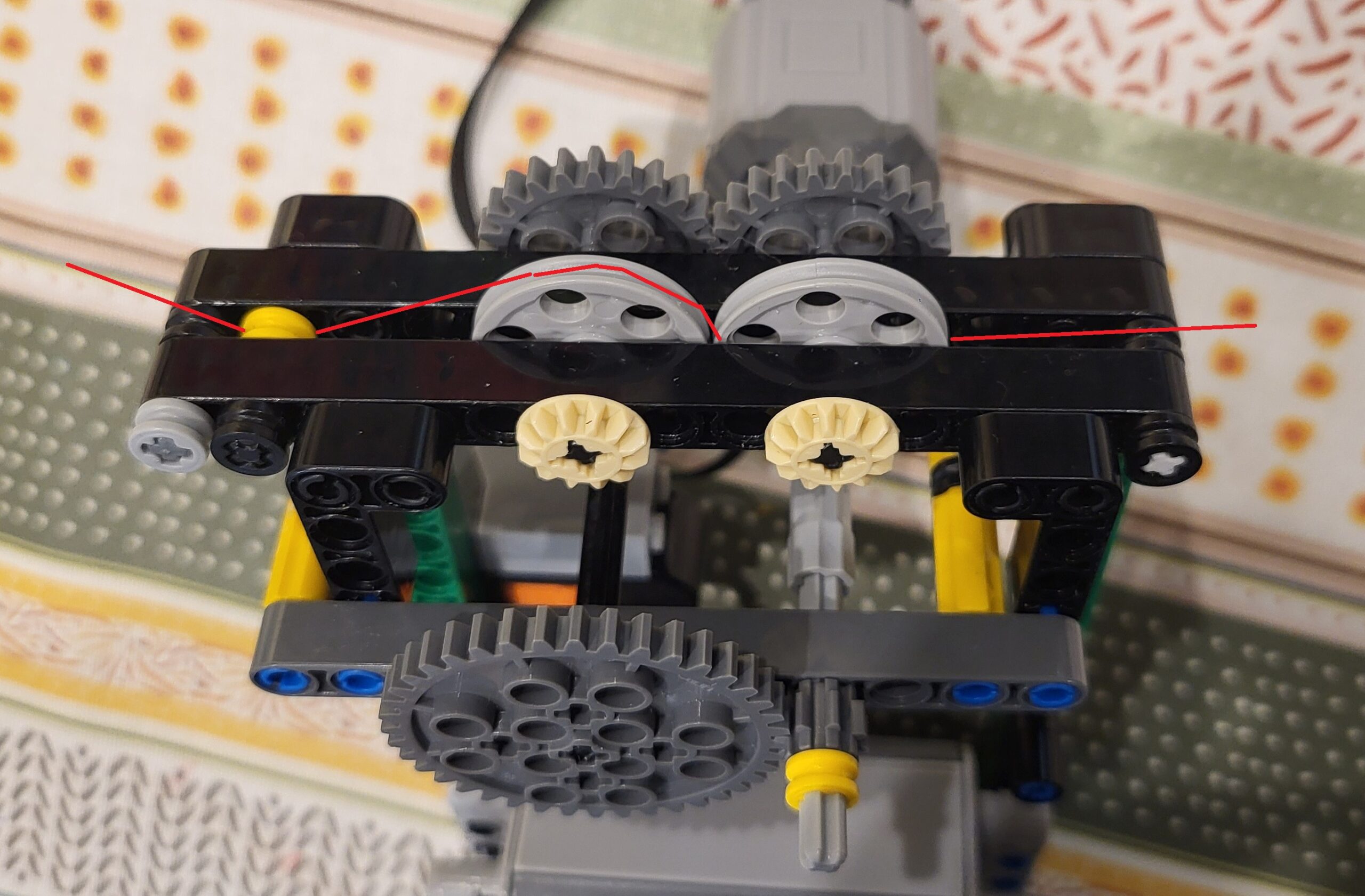
Para la ubicación del cable de nylon, en la siguiente fotografía se muestra el detalle de por donde se tiene que colocar para que se genere la tracción necesaria.
Mecanismo de suspensión sobre cable de nylon para Lego Technic
En rojo he dibujado por donde se tiene que poner el cable de nylon para que se deslice. Es importante tener en cuenta que las ruedas tienes que moverse en direcciones contrarias ya que el hilo coge tracción en una por arriba y en otra por abajo. Para hacerlo, basta con colocar dos poleas juntas.
En el vídeo anterior puede verse como queda una vez montado y en movimiento.
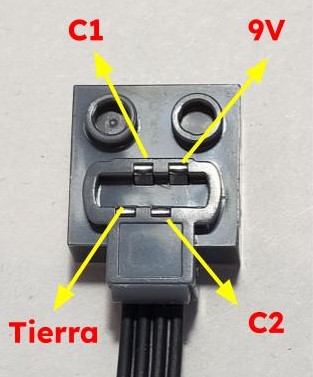
No es evidente, ni siquiera para mi, el funcionamiento del cableado en las Power Functions de Lego. Todos los cables por defecto llevan 4 polos aunque a veces solo se utilizan 2.
Cableado de Power Functions en Lego
Lo interesante es como funciona ya que sigue una lógica no convencional pero realmente útil:
Tierra: Siempre está conectado. Es el polo negativo.
9V: Siempre está conectado a una tensión de 9V, independientemente de como hayamos asignado la dirección de las baterías en el pack. Es el polo positivo.
C1 y C2: Dependiendo de la dirección que asignemos en el pack de pilas C1 o C2 llevarán 9V o 0V. Es decir, si el interruptor de las pilas está a la derecha, C1 tendrá 9V y C2 cero pero cuando lo movemos a la izquierda, la polaridad se invertirá pasando C1 a 0V y C2 a 9V.
Aunque esta disposición puede resultar redundante, la verdad es que es bastante inteligente ya que con el mismo grupo de 4 polos en un solo cable se pueden realizar todas las combinaciones que queramos de una forma sencilla.
Estas últimas semanas mis hijos y yo estamos jugando bastante con Lego. Más allá de seguir los manuales para seguir montajes, lo que realmente nos (me) gusta es construir cosas por libre y darle un poco a la imaginación.
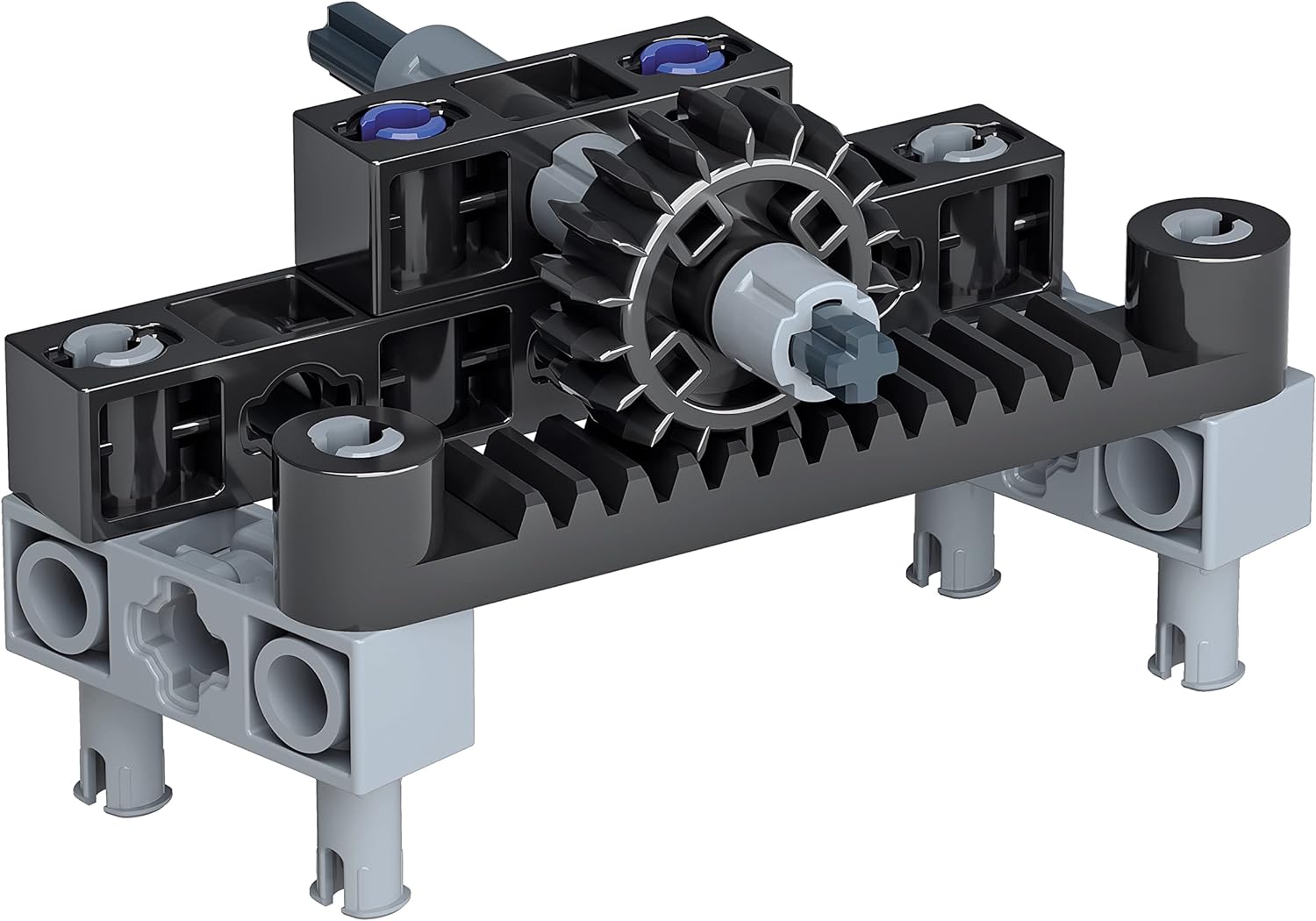
Con Lego Technic y un poco de electrónica, la verdad, es que puedes hacer cosas bastante espectaculares y la mayor complicación no dejan de ser 5 o 6 mecanismos claves, uno de ellos el control de dirección. Aquí os dejo un esquema que he encontrado, no precisamente de Lego, pero que es totalmente aplicable si queremos contruir un sistema de dirección para cualquier tipo de vehículo. El montaje es tan claro que no precisa explicación adicional.
Control de dirección para Lego Technic (foto de Clementoni Mechanics Lab Set)
En otro momento publicaré algo sobre diferenciales. ese gran mundo que por mucho que haya montado ya unos cuantos aun no acabo de entender bien como funcionan.
Pol y yo estamos construyendo un ascensor con Lego y pretendemos ponerle una botonera y que vaya al piso que pulsemos. La tarea no es tan fácil como parece porque vamos a utilizar un Arduino y necesitaremos una unidad de potencia para controlar el motor (un puente dual H L298N), la botonera y un medidor de distancia para saber donde está el ascensor en cada momento.
Podíamos haberlo hecho con sensores en cada piso pero entonces el cableado iba a ser un infierno así que pensamos que un medidor de distancia podría funcionar bien. Nos decantamos por un medidor laser porque el ángulo de salida es más estrecho y así nos evitamos los rebotes típicos en los medidores por ultrasonidos.
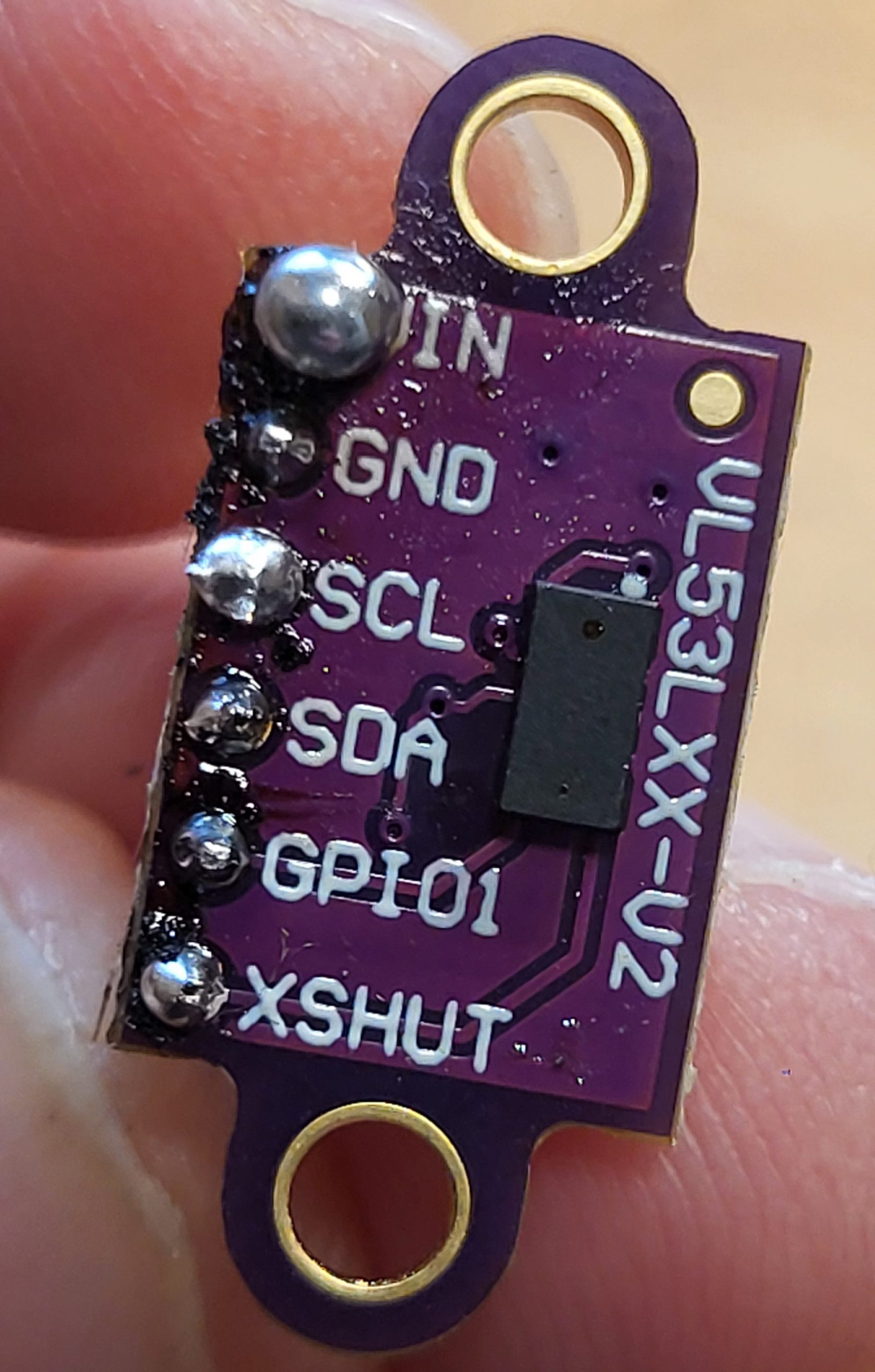
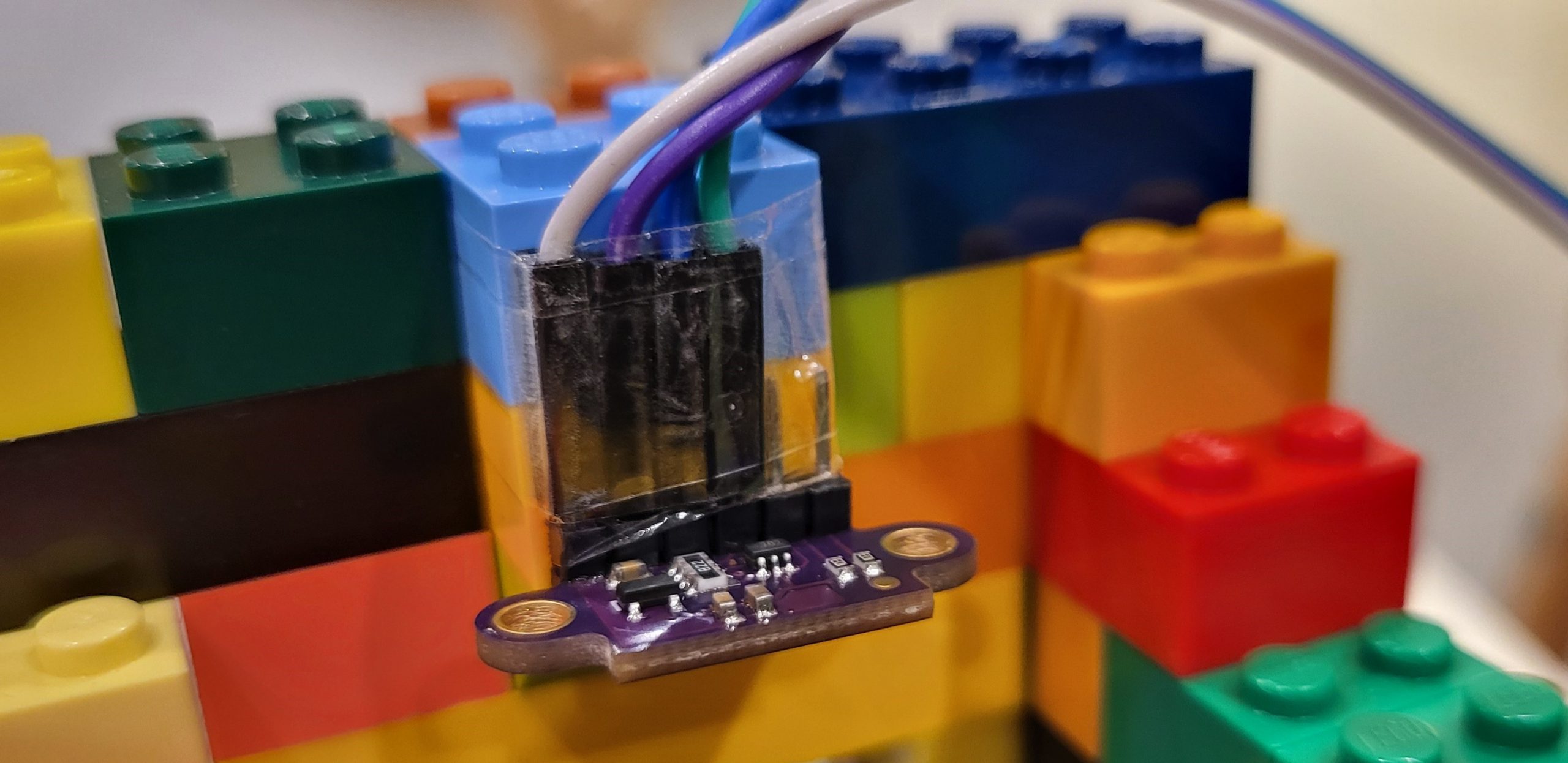
Al final, el escogido ha sido el VL53LXX-V2 (llamado «time-of-flight» porque calcula el tiempo de ida y vuelta del haz laser), que incorpora un diminuto emisor y receptor laser con un ángulo de salida de unos 25º. Si lo compras, vas a tener que soldar los terminales tú mismo lo cual no es mayor problema. En mi caso, me llevo un poco de tiempo porque las puntas son muy pequeñas y mi soldador un poco antiguo (25 años al menos).
Medidor Laser Time-of-Flight VL53LXX-V2
Para engancharlo a las piezas de lego, no me compliqué mucho la vida y lo pegué por la parte de los terminales y cable con celo a un doble bloque 4×4.
VL53LXX-V2 para Lego y Arduino
El esquema de conexión es sencillo:
Arduino
VL53LXX-V2
5V
VIN (blanco)
GND
GND (lila)
SCL
SCL (azul)
SDA
SDA (verde)
El siguiente paso ha sido preparar el sketch para nuestro Arduino One Rev4. En nuestro caso, para probarlo, hemos enviado la lectura de la distancia al serial monitor. Hemos utilizado la librería «Adafruit_VL53L0X» en la versión 1.2.4.
const int EchoPin = 5;
const int TriggerPin = 6;
void setup() {
Serial.begin(9600);
pinMode(TriggerPin, OUTPUT);
pinMode(EchoPin, INPUT);
}
void loop() {
int cm = ping(TriggerPin, EchoPin);
Serial.print("Distancia: ");
Serial.println(cm);
delay(1000);
}
int ping(int TriggerPin, int EchoPin) {
long duration, distanceCm;
digitalWrite(TriggerPin, LOW);
delayMicroseconds(4);
digitalWrite(TriggerPin, HIGH);
delayMicroseconds(10);
digitalWrite(TriggerPin, LOW);
duration = pulseIn(EchoPin, HIGH);
distanceCm = duration * 10 / 292/ 2; //convertimos la distancia a cms
return distanceCm;
}
El funcionamiento final es impecable. Me ha sorprendido la fiabilidad y precisión que ofrece en la medida de la distancia. Pese a todo, una vez montado dentro del ascensor, pierde un poco de exactitud en la planta baja porque el ángulo se extiende mucho y debe tener algún rebote inesperado, pero nada que al final no se pueda arreglar con una tabla ajustada manualmente.
Pol, Blanca y yo estuvimos el fin de semana pasado construyendo un ascensor con Lego. Obviamente, la mayor complejidad estaba en el mecanismo eléctrico para mover el ascensor entre las distintas plantas y más concretamente para hacerlo bajar.
En el diseño inicial, pusimos la caja del ascensor dentro de un armazón pero la fricción por sus cuatro lados hacía que el motor lo hiciera subir pero no bajar. Para solventarlo, montamos una nueva columna de pisos donde solamente había rozamiento en dos puntos que equivalían al 5% de todo el perímetro de la caja del ascensor. Y funcionó!.
Ascensor eléctrico hecho con Lego
El siguiente pasó será añadirle los botones de los pisos y algún sistema electrónico para poder controlar que el motor se detenga en cada una de las plantas al pulsarlos. Quizás un buen momento para comenzar con un Arduino.